- 発表
-
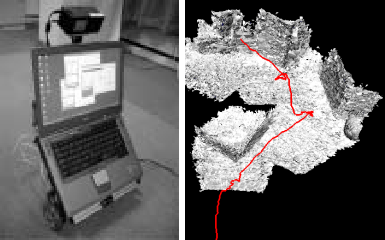
Keiji Nagatani, Kazuya Yoshida, Kiyoshi Kiyokawa, Yasushi Yagi, Tadashi Adachi, Hiroaki Saitoh, Toshiya Suzuki, Osamu Takizawa, "Development of a Networked Robotic System for Disaster Mitigation - System Description of Multi-robot System and Report of Performance Tests-", In Proceedings of the 6th International Conference on Field and Service Robotics, pp.333-342, 2007.
-
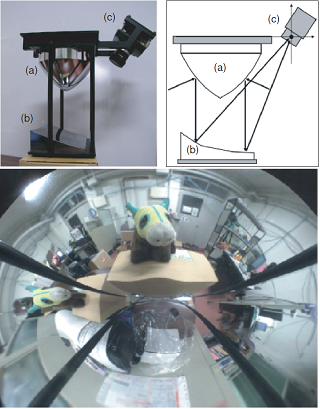
Kazuaki Kondo, Yasuhiro Mukaigawa, Toshiya Suzuki, Yasushi Yagi, "Evaluation of a HBP mirror system for remote surveillance", In Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, October 11-13, 2006.
-
Kazuya Yoshida, Keiji Nagatani, Kiyoshi Kiyokawa, Yasushi Yagi, Tadashi Adachi, Hiroaki Saitoh, Hiroyuki Tanaka, Hiroyuki Ohno, "Development of a Networked Robotic System for Disaster Mitigation - Test Bed Experiments for Remote Operation Over Rough Terrain and High Resolution 3D Geometry Acquisition -", In Proc. the 5th International Conference on Field and Service Robotics, North Queensland, Australia, 29-31, July, 2005.
-
近藤 一晃, 向川 康博, 鈴木 俊哉, 八木 康史, "遠隔監視システムを用いた災害地情報収集のための非等方性全方位視覚系", 日本ヴァーチャルリアリティ学会論文誌, vol.12, no.2, June, 2007.
-
近藤一晃, 向川康博, 鈴木俊哉, 八木康史, "遠隔操縦探索における非等方性全方位視覚の性能評価", 画像の認識・理解シンポジウム論文集(MIRU2006), pp.424-429, 7月, 2006.
-
吉田和哉, 永谷圭司, 遠藤大輔, 水内健祐, Mora Andres, 清川清, 八木康史, 近藤一晃, 足立 忠司, 斉藤浩明, 新美義博, 矢代裕之, 芹澤 一雅, 田中紘幸, 大野浩之, "遠隔ロボットを用いた災害時マルチメディア情報収集技術の研究 -親子型複数ローバーを用いた被災環境探索システムの構築", ロボティクス・メカトロニクス講演会'06予稿集, 2006.
-
吉田, 清川, 八木, 足立, 斎藤, 田中, 大野, "遠隔ロボットを用いた災害時マルチメディア情報収集技術の研究(遠隔移動ロボットおよび視覚・提示系の開発)", ロボティクスシンポジア, 箱根, 3月14-15日, 2005.
-
吉田, 清川, 八木, 足立, 斎藤, 田中, 大野, "遠隔ロボットを用いた災害時マルチメディア情報収集技術の研究", 日本ロボット学会学術講演会, 函館, 9月15日, 2004.
-
吉田, 清川, 八木, 足立, 斎藤, 田中, 大野, "遠隔ロボットを用いた災害時マルチメディア情報収集技術の研究-ロボットのシステムデザイン", 計測自動制御学会SI部門講演会, つくば, 12月18日, 2004.
|