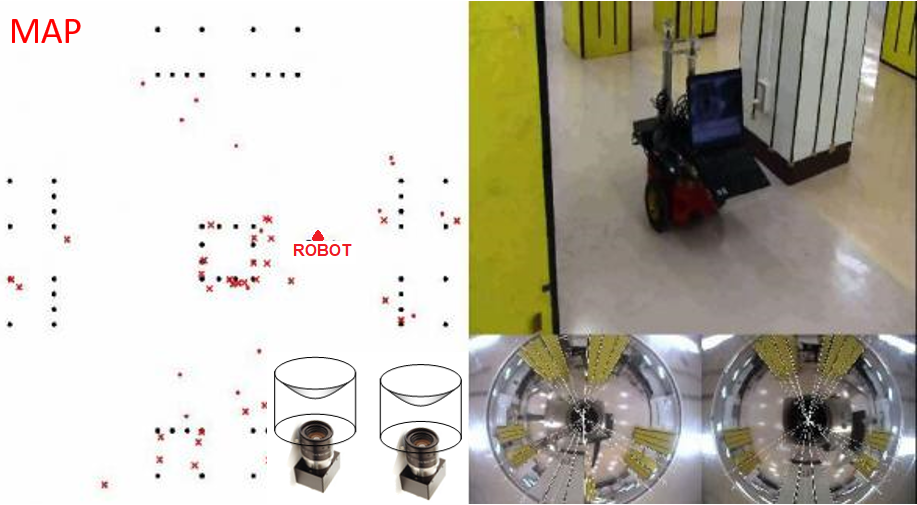
We proposed an innovative hybrid visual SLAM method that combines the advantages and overcome the disadvantages of the binocular and monocular approaches. The advantage of the monocular approach is an easy tracking of feature points and an cabability of building a dense map. However, the monocular approach usually face the scaling factor problem and hence results in inaccurate robot location and built map. Meanwhile, the advantage of binocular method is an accurate robot location and built map without the scaling factor problem. However, the disadvantage of the binocular approach is a lack of map details. We combine the two approaches by adaptively switching between them for each feature point.
- Trung Thanh Ngo, Yusuke Sakaguchi, Hajime Nagahara, Masahiko Yachida,
Stereo SLAM Using Two Estimators,
Proc. IEEE Int. Conf. Robotics and Biomimetics, pp. 19-24, Kuming, China, Dec, 2006.
Finalist for T. J. Tarn Best Paper in Robotics - 坂口雄介,Trung Thanh Ngo, 長原一,谷内田正彦,
単眼・両眼推定器を複合した自己位置と環境の同時推定,
情報科学技術レターズ, pp.207-210, Sep, 2006
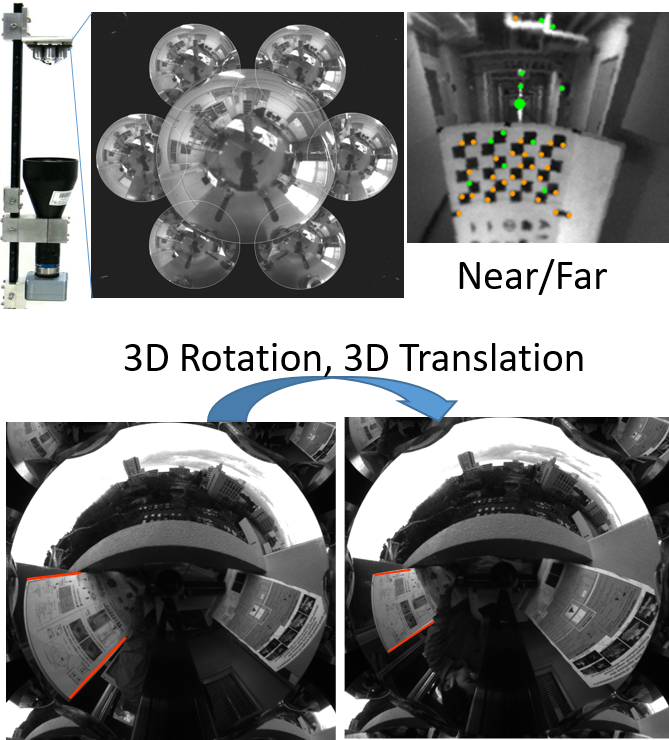
We proposed method to separate the 6D camera motion into 3D rotation and 3D translation and estimate them efficiently. Camera rotation and translation can be estimated by watching only far and near feature points, respectively. Our method is suitable for a stereo camera such as a compound stereo catadiotric camera, which can quickly classify feature points into near and far.
- Trung Thanh Ngo, Yuichiro Kojima, Hajime Nagahara, Ryusuke Sagawa, Yasuhiro Mukaigawa, Masahiko Yachida, Yasushi Yagi,
Real-time Estimation of Fast Egomotion with Feature Classification using Compound Omnidirectional Vision Sensor,
IEICE Transactions on Information and Systems, vol.E93-D, no.01, pp.152–-166, Jan., 2010 - Trung Thanh Ngo, Hajime Nagahara , Ryusuke Sagawa, Yasuhiro Mukaigawa, Masahiko Yachida, Yasushi Yagi,
Robust and Real-Time Egomotion Estimation Using a Compound Omnidirectional Sensor,
In Proc. 2008 IEEE International Conference on Robotics and Automation, pp.492--497, California, USA, May 19-23, 2008. - Trung Thanh Ngo, Hajime Nagahara , Ryusuke Sagawa, Yasuhiro Mukaigawa, Masahiko Yachida, Yasushi Yagi,
Robust and Real-time Rotation Estimation of Compound Omnidirectional Sensor,
Proc. IEEE Int. Conf. Robotics and Automation(ICRA2007) , pp.4226-4231, Rome, Italy, Apr, 2007.
- Hitoshi Yamada, Masayuki Kimura, Jun Ohmiya, Jun’ichi Tagawa, Trung Thanh Ngo, Yasuhiro Mukaigawa, Yasushi Yagi,
Image Stabilization Algorithm for Video with Large Image Fluctuation,
Proc. ICCE2009, Jan.2009.
- Naoyuki Maeda, Amandine Paulo-Guieu, Trung Thanh Ngo, Hideaki Uchiyama, Hajime Nagahara, Rin-ichiro Taniguchi,
Bundler for Fisheye Camera Models,
The 22nd Korea-Japan Joint Workshop on Frontiers of Computer Vision (FCV), pp.182-186, Feb. 2016