# 卒論テーマ:複眼全方位センサによる奥行き検出能力の評価
# 複眼全方位センサ
複数の球面鏡と単一のカメラから構成されるセンサ(図1)であり,
周囲360°の近くにある物体を検出することができる.
このセンサは小型軽量であることから,携帯型の監視カメラなどに適していると考えている.
今回はひとつの大きな球面鏡(中央鏡)と6つの小さな球面鏡(周辺鏡)とからなる複合球面鏡(図2)を用いた
複眼全方位センサを使用した.
 図1:複眼全方位センサ
|
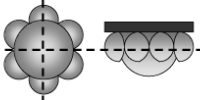 図2:複合球面鏡
|
 図3:撮影画像例
|
# 物体を検出する原理
実時間で処理を行うために,物体が無限遠にあるかどうかのみを判断する手法を提案している. まず,物体が無限遠にある場合の各球面鏡に映る点の対応を計算などによって求めておく(図4). 実際に得られた画像において,近くにある物体は先ほど求めた対応点とは異なった位置に映るので, 物体が無限遠にある場合の画像との差分を取ることで,近くにある物体を検出できる(図5,図6).
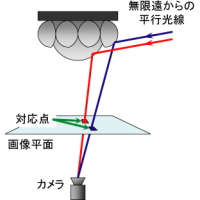 図4:物体からの光線の軌跡
|
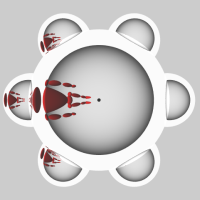 図5:入力画像
|
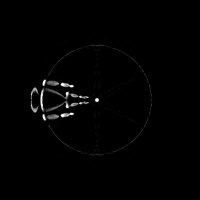 図6:検出結果
|
# 無限遠における対応点の測定
物体が無限遠にある場合の鏡に映る点を求めるためには,各球面鏡とカメラの位置や形を正確に知る必要があるため難しかった. そこで,実際に十分遠くにおいた点光源を観測することで対応点を求めることを提案する. 点光源を観測して得られる画像から,光源の中心位置を対応点とする(図7). これをセンサを回転させながら観測することで,対応点を求めていく(図8).
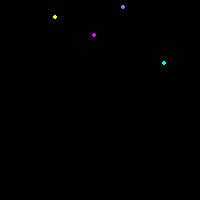 図7:観測した光源から求めた対応点の例
|
 図8:対応点計測のための装置
|
# システムの性能評価
複眼全方位センサの性能向上のために,用いる鏡の形状を考える必要がある.
そのために,まず複合球面鏡によってどのぐらい近くの物体を検出できるのかを求める.
しかし,それを求めるのは困難である.
よって,画像平面上の各画素を通る光線のみを考え,物体を検出できる距離を求める.
この結果,中央付近では性能が高く,端に行くにつれて性能が低くなることが分かった(図9,図10).
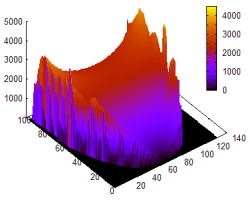 図9:検出できる距離
|
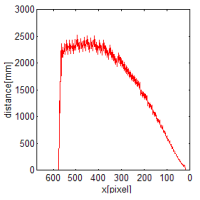 図10:検出できる距離(中央一列)
|