Optics for Computer Vision
Omnidirectional camera and wearable sensor
Wearable Imaging System for Capturing Omnidirectional Movies from a First-person Perspective
|
 |
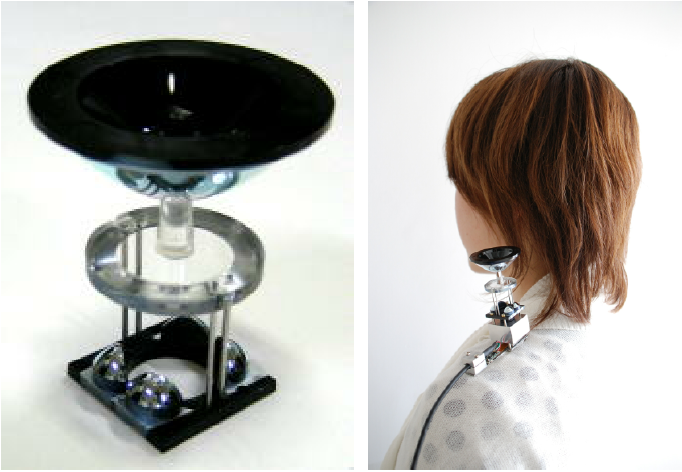
We propose a novel wearable imaging system that can capture om- nidirectional movies from the viewpoint of the camera wearer. The imaging system solves the problems of resolution uniformity and gaze matching that conventional approaches do not address. We combine cameras with curved mirrors that control the projection of the imaging system to produce uniform resolution. Use of the mir- rors also enables the viewpoint to be moved closer to the eyes of the camera wearer, thus reducing gaze mismatching. The optics, in- cluding the curved mirror, have been designed to form an objective projection. The capability of the designed optics is evaluated with respect to resolution, aberration, and gaze matching. We have de- veloped a prototype based on the designed optics for practical use. Capability of the prototype and effectiveness of first-person per- spective omnidirectional movies were demonstrated through quan- titative evaluations and presentation experiments to ordinary peo- ple, respectively.
|
- Publications
-
K.Kondo, Y.Mukaigawa, Y.Yagi, "Wearable Imaging System for Capturing Omnidirectional Movies from a First-person Perspective", In Proc. VRST2009, Nov., 2009.
|
Integrability-based Free-form Mirror Design
|
 |
A significant issue in the design of catadioptric imaging systems is what shape the component mirrors should take. In this paper, we propose a novel algorithm for designing a free-form mirror. A free-form mirror expressed as the assembly of its gradients, is the most flexible surface representation that can form various shapes. We improve the shape reconstruction framework used in a photometric stereo scheme for use in the design of free-form mirrors for catadioptric imaging systems. An optimal mirror shape is created to produce the best possible desired projection, under integrability conditions in order to be a consistent surface. Curved mirrors are designed for various catadioptric configurations and these design experiments confirm that the resulting free-form mirrors can approximate the desired projections.
|
- Publications
-
K.Kondo, Y.Mukaigawa, Y.Yagi, ``Integrability-based Free-form Mirror Design'', IPSJ Transactions on Computer Vision and Applications, Vol.1, pp.158-173, Sep., 2009.[PDF]
-
K.Kondo, Y.Mukaigawa, Y.Yagi, "Free-Form Mirror Design Inspired by Photometric Stereo", Proc. OMNIVIS 2008, Oct. 2008.[PDF]
|
Compound Omnidirectional Camera
|
 |
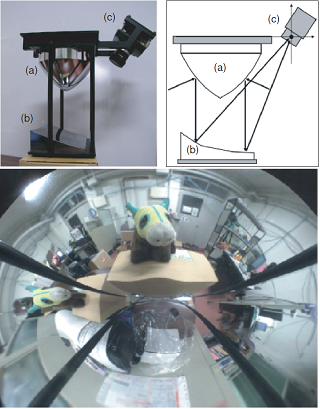
This paper describes a portable omnidirectional stereo system, which can detect approaching close objects. The system consists of a single camera and multiple convex mirrors. The sensor has omnidirectional observation and portability. Since an object is projected on each mirror, our method simultaneously obtains omnidirectional images of multiple viewpoints. We propose a method of detecting near objects without finding correspondences along epipolar lines. This paper also describes a method for calibrating a multiple omnidirectional mirror sensor and we estimated the ability of detecting near objects by a simulation and experiments in the real world.
|
- Publications
-
Haruka Azuma, Yasuhiro Mukaigawa, Yasushi Yagi, "Spatio-Temporal Lifelog Using a Wearable Compound Omnidirectional Sensor", In Proceedings of the IEEE Workshop on OMNIVIS, Marseille, France, 2008.
-
Yuichiro Kojima, Ryusuke Sagawa, Tomio Echigo, Yasushi Yagi, "Calibration and Performance Evaluation of Omnidirectional Sensor with Compound Spherical Mirrors", In The 6th Workshop on Omnidirectional Vision, Camera Networks and Non-classical cameras, 2005.
|
Non-isotropic Omnidirectional Imaging System
|
 |
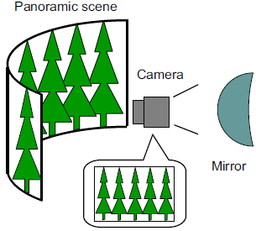
A real-time omnidirectional imaging system that can acquire an omnidirectional field of view at video rate using a convex mirror was applied to a variety of conditions. The imaging system consists of an isotropic convex mirror and a camera pointing vertically toward the mirror with its optical axis aligned with the mirror's optical axis. Because of these optics, angular resolution is independent of the azimuth angle. However, it is important for a mobile robot to find and avoid obstacles in its path. We consider that angular resolution in the direction of the robot's moving needs higher resolution than that of its lateral view. In this paper, we propose a non-isotropic omnidirectional imaging system for navigating a mobile robot.
|
- Publications
-
Kazuaki Kondo, Yasushi Yagi, Masahiko Yachida, "Non-isotropic Omnidirectional Imaging System for an Autonomous Mobile Robot", In Proc. 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, April 18-22, 2005.
|
Omnidirectional Vision Attachment for Medical Endoscopes
|
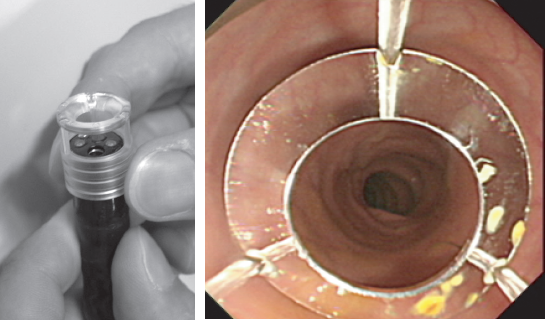 |
Medical endoscopes are equipped with wide-angle lenses to provide a wide field of view operating doctors. However, it has been pointed out that there is a backward looking blind area for endoscopes such that an affected area could be overlooked since the gastrointestinal system is intricate and the inside shaped by plicae. In this paper, we propose an omnidirectional vision attachment that has a convex mirror fitted at the tip of an endoscope. The attachment enables backward observations with the endoscope by providing a 360 degrees view. The issue related to developing this attachment is illumination of the field of view. Because the light source is usually only the light at the tip of the endoscope when it is inside the organ, we designed an attachment to illuminate the back-looking viewing field by reflecting light in a mirror. In the experiment, we measured the field of view and the illuminated field, and confirmed that the field behind an endoscope tip can be observed using the attachment.
|
- Publication
-
Ryusuke Sagawa, Takurou Sakai, Tomio Echigo, Keiko Yagi, Masatsugu Shiba, Kazuhide Higuchi, Tetsuo Arakawa, Yasushi Yagi, "Omnidirectional Vision Attachment for Medical Endoscopes", In Proc. the Eighth Workshop on Omnidirectional Vision, Camera Networks and Non-classical Cameras, Marseille, France, October 17, 2008.
|
High Dynamic Range Camera using Transmissive/Reflective Liquid Crystal
|
 |
Wide Dynamic Range Images (WDRIs) are needed for capturing scenes which include drastic lighting changes. This paper presents a method to widen the dynamic range of a camera by using a transmissive/reflective liquid crystal. The transmissive system can adaptively control scene radiance using the liquid crystal filter placed in front of the camera. Although the masking effect of the filter blurs, the blurring function was not strictly analyzed. In this paper, the blurring function is estimated using an experimental system. We have confirmed that WDRIs are clearly generated using the blurring function. The reflective system consists of a camera and a reflective liquid crystal placed in front of the camera. By controlling the attenuation ratio of the liquid crystal, scene radiance of each pixel is controlled adaptively. After applying the control, the original scene radiance is derived from the attenuation ratio of the liquid crystal and the radiance obtained by the camera. We have implemented a prototype system and conducted experiments in a scene that includes drastic lighting changes. We confirmed that the radiance of each pixel could be indenpendently controlled, and that WDRIs could be obtained by calculating the original scene radiance from these results.
|
- Publication
-
Hidetoshi Mannami, Ryusuke Sagawa, Yasuhiro Mukaigawa, Tomio Echigo, Yasushi Yagi, "High Dynamic Range Camera using Reflective Liquid Crystal", In Proc. IEEE International Conference on Computer Vision, Rio de Janeiro, Brazil, October 14-20, 2007.
-
Hidetoshi Mannami, Ryusuke Sagawa, Yasuhiro Mukaigawa, Tomio Echigo, Yasushi Yagi, "Adaptive dynamic range camera with reflective liquid crystal", Journal of Visual Communication and Image Representation, vol.18, Issue 5, pp.359-365, Oct., 2007.
|