Motion
Tracking and Detection
| Tracking by Gait Recognition |
|
| Gait recognition has recently gained attention as an effective approach to identify individuals at a distance from a camera. Most existing gait recognition algorithms assume that people have been tracked and silhouettes have been segmented successfully. Tacking and segmentation are, however, very difficult especially for articulated objects such as human beings. Therefore, we present an integrated algorithm for tracking and segmentation supported by gait recognition. After the tracking module produces initial results consisting of bounding boxes and foreground likelihood images, the gait recognition module searches for the optimal silhouette-based gait models corresponding to the results. Then, the segmentation module tries to segment people out using the provided gait silhouette sequence as shape priors. Experiments on real video sequences show the effectiveness of the proposed approach. | |
|
|
| Visual tracking and segmentation using appearance and spatial information of patches |
|
| Object tracking and segmentation find a wide range of applications in robotics. Tracking and segmentation are difficult in cluttered and dynamic backgrounds. We propose a tracking and segmentation algorithm in which tracking and segmentation are performed consecutively. We separate input images into disjoint patches using an efficient oversegmentation algorithm. Objects and their background are described by bags of patches. We classify the patches in a new frame by searching \emph{k} nearest neighbors. K-d trees are constructed using these patches to reduce computational complexity. Target location is estimated coarsely by running the mean-shift algorithm. Based on the estimated locations, we classify the patches again using appearance and spatial information. This strategy outperforms direct segmentation of patches based on appearance information only. Experimental results show that the proposed algorithm provides good performance on difficult sequences with clutter. | |
|
|
| Switching Local and Covariance Matching for Efficient Object Tracking |
|
 |
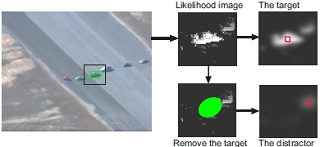
The covariance tracker finds the targets in consecutive frames by global searching. Covariance tracking has achieved impressive successes thanks to its ability of capturing spatial and statistical properties as well as the correlations between them. Nevertheless, the covariance tracker is relatively inefficient due to its heavy computational cost of model updating and comparing the model with the covariance matrices of the candidate regions. Moreover, it is not good at dealing with articulated object tracking since integral histograms are employed to accelerate the searching process. In this work, we aim to alleviate the computational burden by selecting appropriate tracking approaches. We compute foreground probabilities of pixels and localize the target by local searching when the tracking is in steady states. Covariance tracking is performed when distractions, sudden motions or occlusions are detected. Different from the traditional covariance tracker, we use Log-Euclidean metrics instead of Riemannian invariant metrics which are more computationally expensive. The proposed tracking algorithm has been verified on many video sequences. It proves more efficient than the covariance tracker. It is also effective in dealing with occlusions, which are an obstacle for local mode-seeking trackers such as the mean-shift tracker. |
|
|
| Adaptive Mean-Shift Tracking with Auxiliary Particles |
|
 |
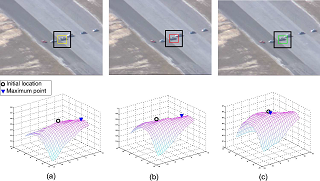
We present a new approach for robust and efficient tracking by incorporating the efficiency of the mean-shift algorithm with the multi-hypothesis characteristics of particle filtering in an adaptive manner. The aim of the proposed algorithm is to cope with problems brought about by sudden motions and distractions. The mean-shift tracking algorithm is robust and effective when the representation of a target is sufficiently discriminative, the target does not jump beyond the bandwidth, and no serious distractions exist. We propose a novel two-stage motion estimation method that is efficient and reliable. If a sudden motion is detected by the motion estimator, some particle filtering-based trackers can be used to outperform the mean-shift algorithm at the expense of using a large particle set. In our approach, the mean-shift algorithm is used as long as it provides reasonable performance. Auxiliary particles are introduced to cope with distractions and sudden motions when such threats are detected. Moreover, discriminative features are selected according to the separation of the foreground and background distributions when threats do not exist. This strategy is important since it is dangerous to update the target model when the tracking is in an unsteady state. We demonstrate the performance of our approach by comparing it with other trackers in tracking several challenging image sequences. |
|
|
| Integrating Color and Shape-Texture Features for Adaptive Real-Time Object Tracking |
|
 |
We extend the standard mean-shift tracking algorithm to an adaptive tracker by selecting reliable features from color and shape-texture cues according to their descriptive ability. The target model is updated according to the similarity between the initial and current models, and this makes the tracker more robust. The proposed algorithm has been compared with other trackers using challenging image sequences, and it provides better performance. |
|
|