移動ロボットによる環境認識のための実時間距離画像位置合わせ
| 概要 |
|---|
1.移動ロボットによる環境認識 |
||||||||||||||
|
遠隔操作できる移動ロボットを用いて周囲の情報収集を行う理由はいろいろあるが、そのうちのひとつに被災地での救助 ・復旧活動に用いるということがあげられる。被災地では、
収集した情報を元に環境の三次元モデルを作成し、環境認識を行う。
この三次元モデルを作成するためにはロボットがどこでどのように情報を得たか知る必要があるため、
ロボット位置の推定も同時に行わなければならない。
|
||||||||||||||
2.レンジセンサと距離画像 |
||||||||||||||
|
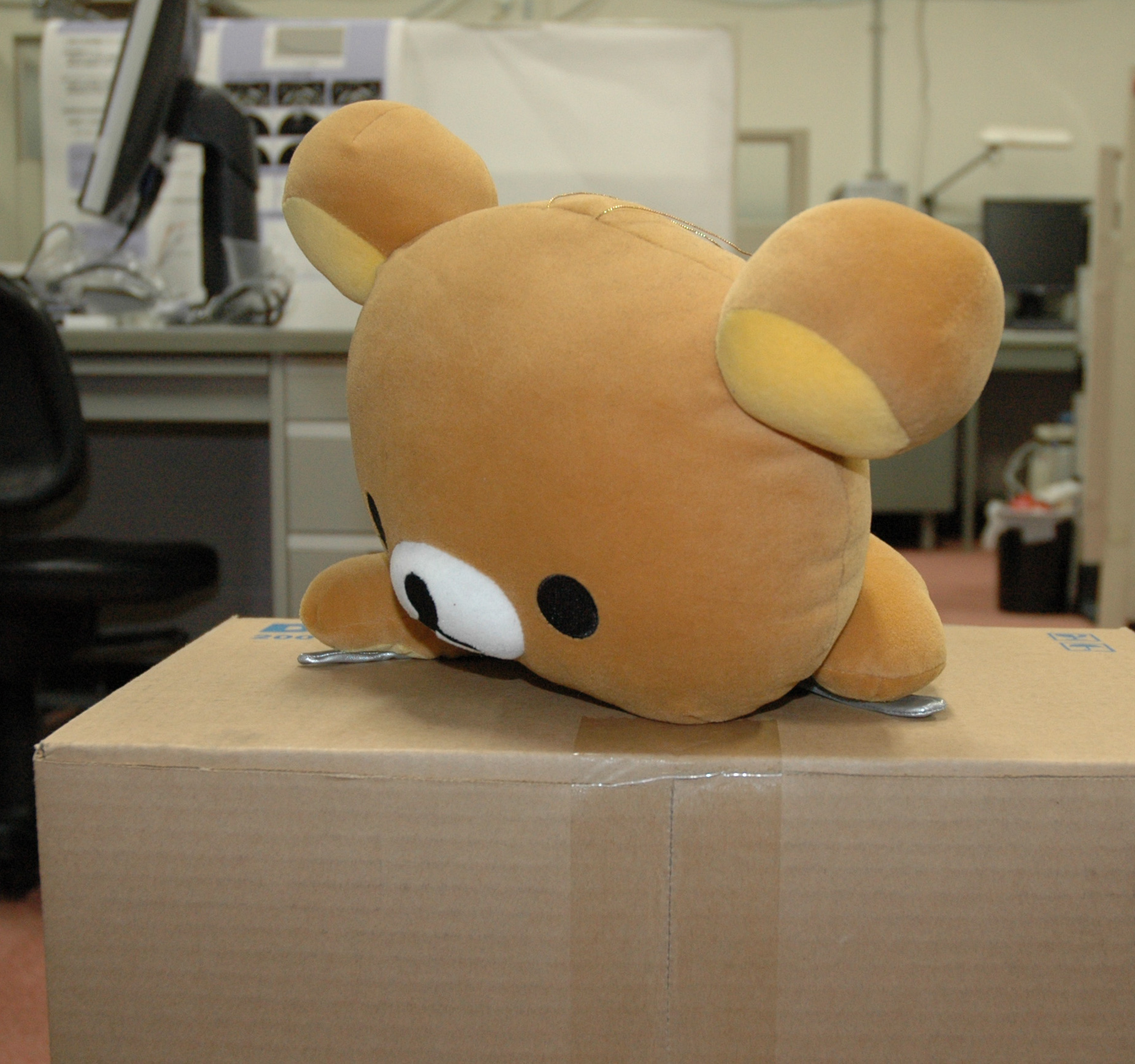
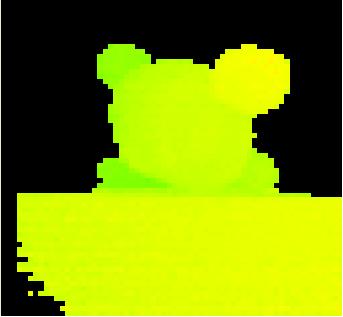
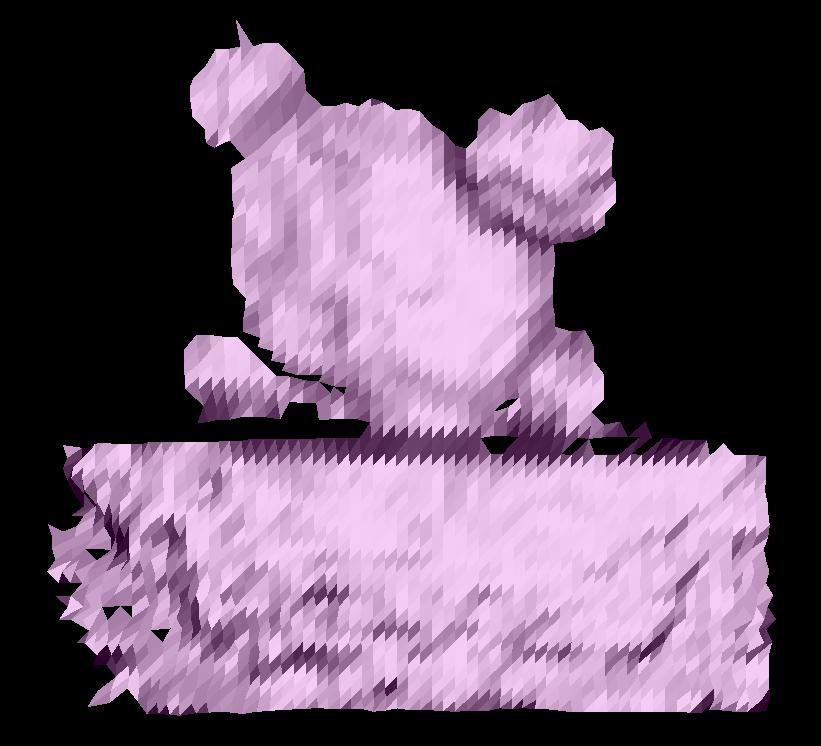
レンジセンサは対象物体までの距離を計測できるセンサである。
上図(a)ような物体を計測して得られた距離画像を色で表示すると(b)のようになる。 また、(c)のように三次元空間に頂点をとってポリゴン表示することもできる。 |
||||||||||||||
3.距離画像の位置合わせ |
||||||||||||||
|
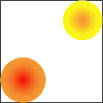
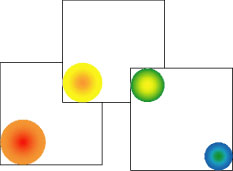
距離画像一枚一枚は環境全体のうちの部分的な情報しか持たないため、
距離画像同士の相対位置を求めて位置合わせを行い、全体のモデルを作成する。
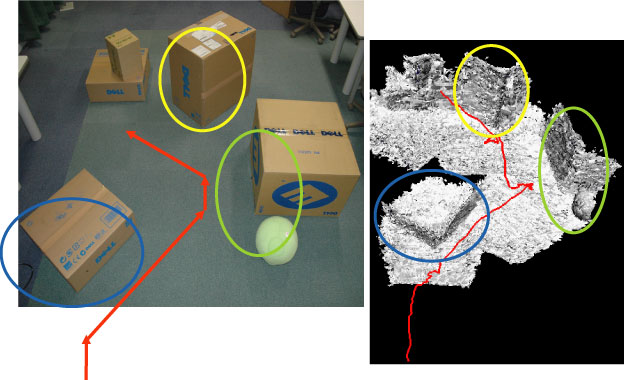
例えば、上図のように位置関係のわからない3枚の距離画像の位置合わせを行うと、4つの球の位置関係を知ることができる。 ロボットにレンジセンサを搭載し移動しながら計測を行う場合、リアルタイムで環境モデリングとセンサ位置推定を行う必要がある。 計測するたびに新しく得た距離画像とその直前の距離画像との位置合わせを行うことで、 順次隣接する距離画像同士の相対位置を求めることができる。 全ての隣接する距離画像の相対位置が分かると、結果として全ての距離画像の相対位置が分かり、全体の環境モデリングをすることができる。また、距離画像の位置関係が分かればその距離画像を計測したときのセンサの位置関係も分かるので、センサ位置推定も行うことができる。 リアルタイム距離画像位置合わせ例(赤線はセンサ位置推定結果を示す) |
||||||||||||||
4.環境モデリングと位置推定の例 |
||||||||||||||
|
実際にロボットにレンジセンサを搭載して環境モデリングと位置推定を行った例を紹介する。 |


Topへ
八木研のページへ